Gazebo Pluginを使って地図を作成する¶
Gazebo Pluginを使って地図を作成する¶
このページではGazebo Pluginを使用する方法について説明します。 Gazebo Pluginを作成するのは発展的な内容を含むため、今回はすでに作成済みのプラグインを使用します。 この章で使われているGazebo Pluginのプログラムは 地図を生成するGazebo Pluginを作る にあります。
まずは、プラグインが含まれているパッケージをダウンロードしてビルドしましょう。
cd ~/catkin_ws/src
git clone https://github.com/uenota/dronedoc.git
cd ..
catkin build
次に、地図出力用のプラグインを使えるようにするために、Worldファイルに以下の内容を追加します。
<plugin filename="map_builder.so" name="map_builder"/>
以下の例の様になればOKです。
<?xml version ='1.0'?>
<sdf version ='1.4'>
<world name='default'>
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://willowgarage</uri>
</include>
<plugin filename="map_builder.so" name="map_builder"/>
</world>
</sdf>
地図を出力する¶
マップを作りたいワールドを起動します。
roslaunch gazebo_ros empty_world.launch world_name:=$HOME/catkin_ws/src/px4_sim_pkg/worlds/willow_garage.world
Gazeboが起動したら以下のコマンドを実行します。
rosrun dronedoc request_publisher 10 0.01 "(-12,0)" 60 50 map.png 255
このコマンドを実行すると、x,y座標が(-12, 0)の点を原点として、50m x 60mの矩形に囲まれた領域の、高さ10mより下にある障害物のマップがカレントディレクトリに map.png として作成されます。
グリッドの間隔は0.01mで、グリッドが占有されていると判断するしきい値は255です。
また、同時に地図の設定ファイルも ~/map.yaml として生成されます。
このコマンドの使用方法は以下のとおりです。
Usage: rosrun dronedoc request_publisher a1 a2 a3 a4 a5 [a6 a7]
a1: height
a2: resolution
a3: "(origin.x, origin.y)"
Origin is the point on lower left corner of map image
a4: map_width
a5: map_height
a6: filename [default="map"]
a7: threshold [default=255]
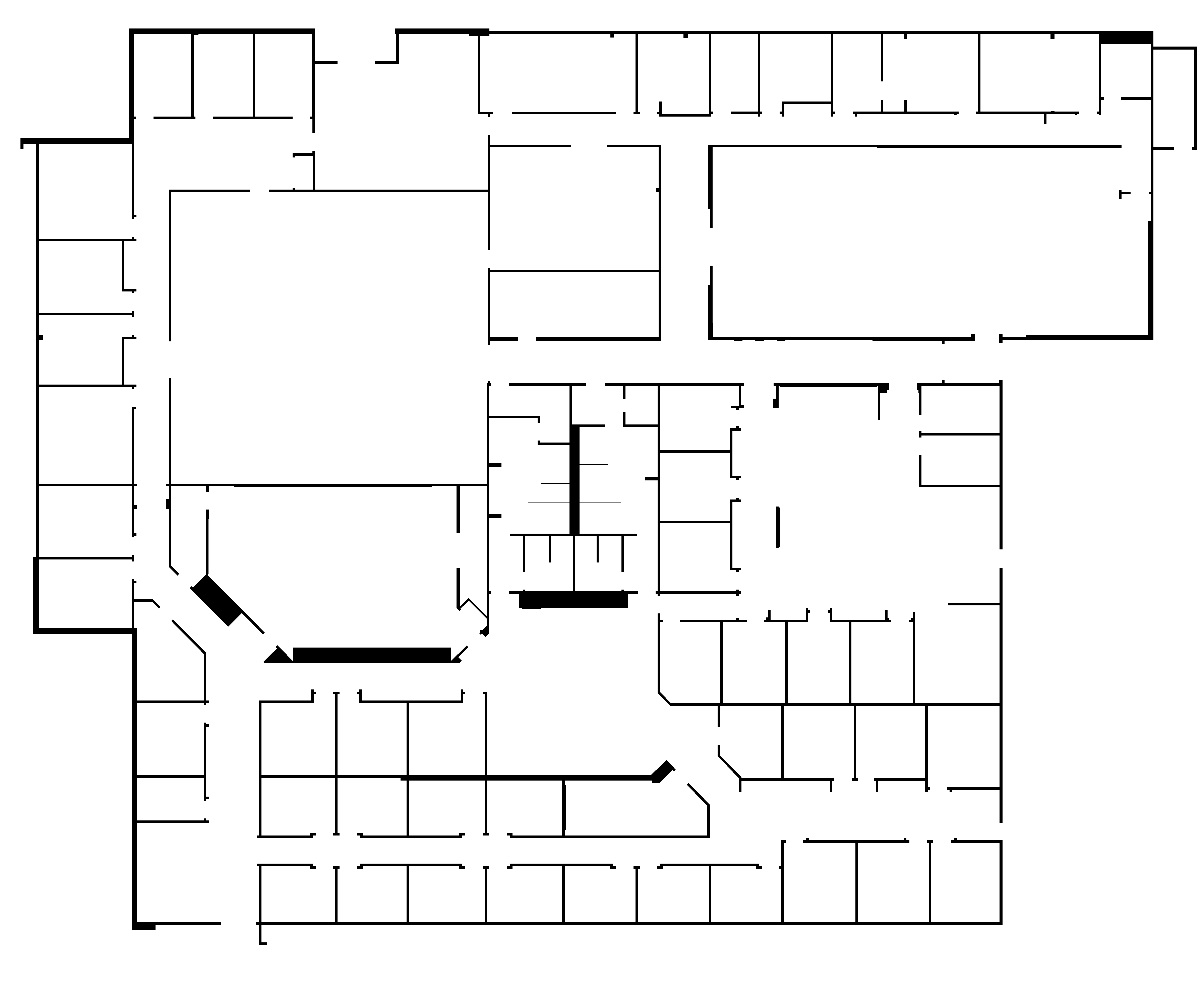
以下のようなワールドに対して上記のコマンドを実行すれば、
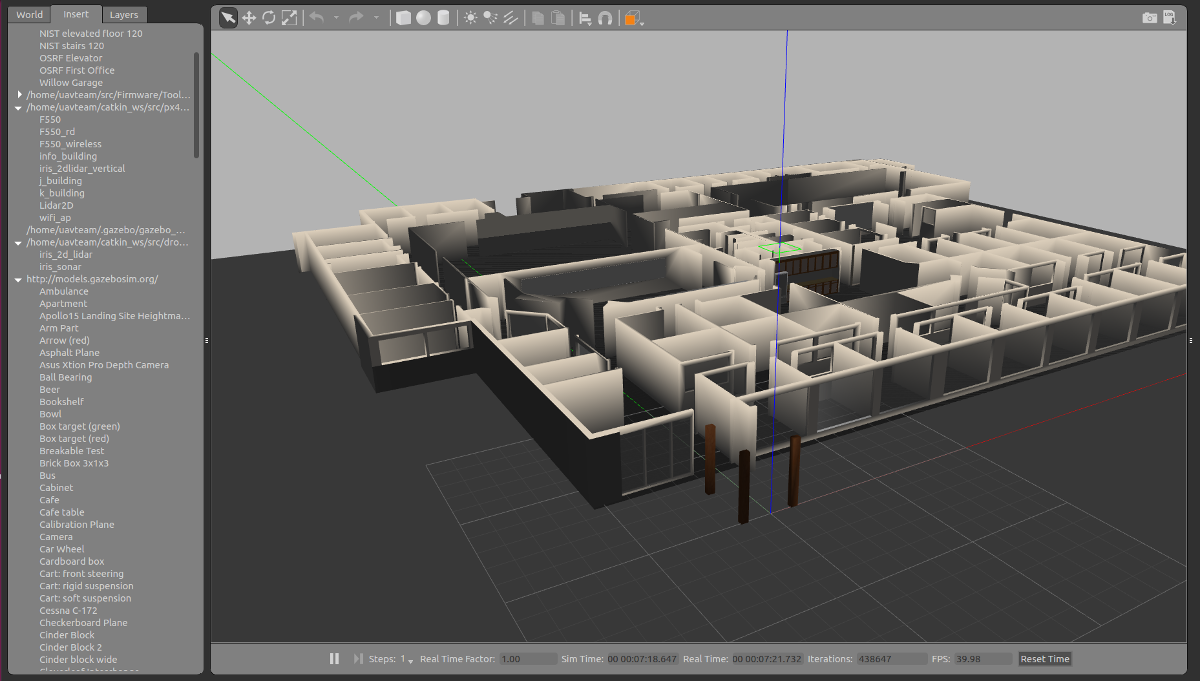
次のような地図が生成されます。 画像左下が原点です。