LiDARのデータをフィルタリングする¶
はじめに¶
ロボットがLiDARの光線に干渉すると、ロボットの一部がスキャンデータに含まれてしまい、マッピングや自己位置推定の精度に影響を与える可能性があります。 このページでは、LiDARのデータをフィルタリングすることでロボットとの干渉を排除する方法を学びます。
LiDARのデータをフィルタリングするには、laser_filters パッケージを使います。 laser_filtersパッケージでは様々なタイプのフィルターが用意されており、これらを用いることで特定の距離の範囲のスキャンデータだけを抽出したり、特定の角度のスキャンデータだけを抽出したりできます。 また、複数のフィルタをつなげてフィルターチェインを作ることもできます。
設定ファイルを書く¶
今回は特定の距離の範囲にあるスキャンデータを抽出するので、 LaseScanRangeFilter を使います。
LaserScanRangeFilter は距離を元にフィルタリングを行うフィルタです。 ここでは、yamlファイル内に設定を記述して、Launchファイル内でそれをロードすることでROSのパラメータを設定します。
以下の内容を、 config/laser_filter.yamlに保存します。
1 2 3 4 5 6 7 8 9 | scan_filter_chain:
- name: range
type: LaserScanRangeFilter
params:
use_message_range_limits: false
lower_threshold: 0.5
upper_threshold: .inf
lower_replacement_value: -.inf
upper_replacement_value: .inf
|
それぞれのパラメータの意味は以下のとおりです。
- name
フィルタの名前
- type
フィルタの種類
- use_message_range_limits
レーザースキャンのメッセージで定義されている最大値、最小値を用いるかどうか
- lower_threshold
小さい方の閾値。これ以下の距離のスキャンデータをフィルタする。
- upper_threshold
大きい方の閾値。これ以上の距離のスキャンデータをフィルタする。
- lower_replacement_value
lower_threshold 以下のスキャンデータにはこの値が使われる。
- upper_replacement_value
upper_threshold 以上のスキャンデータにはこの値が使われる。
パラメータの説明は laser_filtersのROS Wikiページ も参考にしてください。
今回の例では、0.5m以下のスキャンデータが全てフィルタされて値が-.infになります。 上限値は.infにしてあるので、0.5m以上のスキャンデータが置き換えられることはありません。
Launchファイルを作る¶
今回もmymodel_sitl_tf.launchに追加する形で編集します。
以下の内容をLaunchファイルに追加することでlaser_filterパッケージを使用することができます。
1 2 3 4 | <node pkg="laser_filters" type="scan_to_scan_filter_chain" name="laser_filter">
<rosparam command="load" file="$(find px4_sim_pkg)/config/laser_filter.yaml" />
<remap from="scan" to="laser/scan" />
</node>
|
<node> タグでlaser_filtersパッケージを起動しており、 <rosparam> タグで先ほど作成した設定ファイルをロードしています。 また、laser_filtersパッケージは scan トピックにパブリッシュされるスキャンデータをフィルタリングしますが、今回はLiDARから laser/scan トピックにデータがパブリッシュされるので、リマップをしておきます。 laser_filtersによってフィルタリングされたメッセージは scan_filtered トピックにパブリッシュされます。
最終的に、mymodel_laser_filter.launchは以下のとおりになります。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 | <launch>
<node pkg="tf" name="base2lidar" type="static_transform_publisher" args="0 0 0.1 0 0 0 base_link lidar_link 100"/>
<node pkg="tf" name="map2odom" type="static_transform_publisher" args="0 0 0 0 0 0 map odom 100"/>
<arg name="vehicle" default="iris_2d_lidar"/>
<arg name="sdf" default="$(find px4_sim_pkg)/models/iris_2d_lidar/model.sdf" />
<arg name="verbose" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find px4)/launch/mavros_posix_sitl.launch" >
<arg name="sdf" value="$(arg sdf)" />
<arg name="vehicle" value="$(arg vehicle)" />
<arg name="verbose" value="$(arg verbose)" />
<arg name="debug" value="$(arg debug)" />
</include>
<param name="/mavros/local_position/tf/send" type="bool" value="true" />
<param name="/mavros/local_position/frame_id" type="str" value="odom" />
<param name="/mavros/local_position/tf/frame_id" type="str" value="odom" />
<!-- See http://wiki.ros.org/laser_filters for details -->
<node pkg="laser_filters" type="scan_to_scan_filter_chain" name="laser_filter">
<rosparam command="load" file="$(find px4_sim_pkg)/config/laser_filter.yaml" />
<remap from="scan" to="laser/scan" />
</node>
</launch>
|
試してみる¶
ちゃんとフィルタリングされるかどうか試してみましょう。
roslaunch px4_sim_pkg mymodel_laser_filter.launch
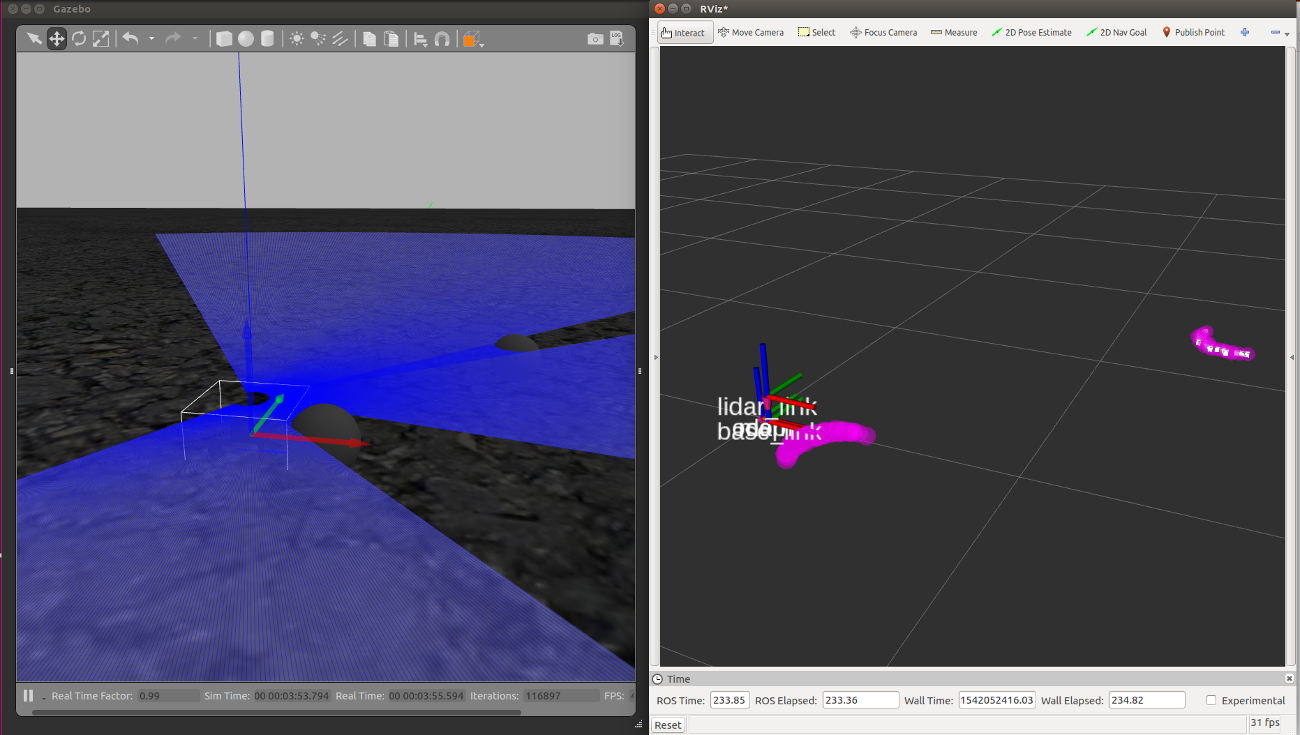
ピンク色の点がフィルタリング前の点で、白の点がフィルタリング後の点です。 近くに置いてある球体の点が除去されていることがわかります
参考¶
- Understanding ROS Services and Parameters
ROSのパラメータの使い方