自律飛行とSLAM¶
このチュートリアルでは、navigation stack パッケージを使ってSLAMを行います。
はじめにGPSを用いた自律飛行、次に2D LiDARのみを用いた自己位置推定と自律飛行、最後に2D LiDARのみを用いたSLAM(Simultaneous Localization and Mapping)を行います。
はじめに¶
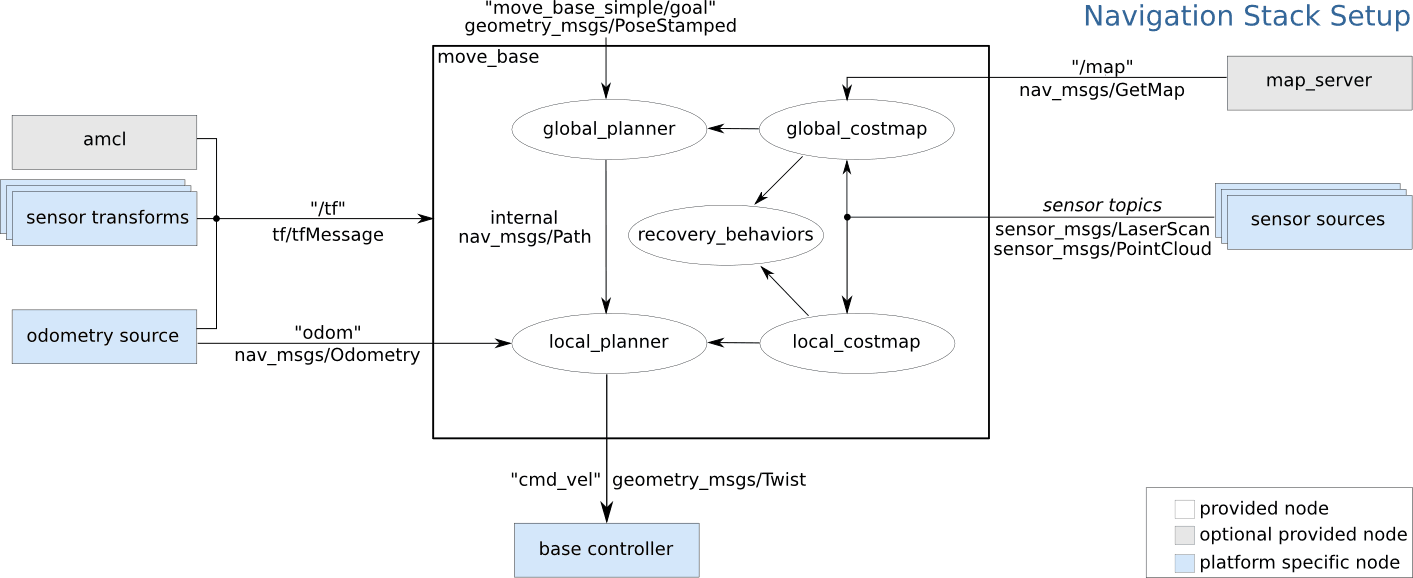
Navigation stackは、ロボットの自律移動を行うために以下のようなサブパッケージを提供しています。
navigation stackのインストール¶
sudo apt install ros-kinetic-amcl \
ros-kinetic-base-local-planner \
ros-kinetic-carrot-planner \
ros-kinetic-clear-costmap-recovery \
ros-kinetic-costmap-2d \
ros-kinetic-dwa-local-planner \
ros-kinetic-fake-localization \
ros-kinetic-global-planner \
ros-kinetic-map-server \
ros-kinetic-move-base \
ros-kinetic-move-base-msgs \
ros-kinetic-move-slow-and-clear \
ros-kinetic-nav-core \
ros-kinetic-navfn \
ros-kinetic-rotate-recovery \
ros-kinetic-voxel-grid
参考¶
- Navigation stack tutorial
navigation stackパッケージのチュートリアル
- 2D Mapping & Navigation
Navigation Stackを使ってSLAMをしている例
- Navigation Stack を理解する - 1. 導入 - Qiita
Navigation Stackを使ってみる